robotica

La robótica es la rama de la ingeniería mecatrónica, de la ingeniería eléctrica, de la ingeniería electrónica y de las ciencias de la computación que se ocupa del diseño, construcción, operación, disposición estructural, manufactura y aplicaciónde los robots.1 2
La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial, la ingeniería de control y la física.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables, la animatrónica y las máquinas de estados.
El término robot se popularizó con el éxito de la obra R.U.R. (Robots Universales Rossum), escrita por Karel Čapek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa trabajos forzados o trabajador, fue traducida al inglés como robot.
Robótica Industrial

Cuando hablamos del concepto de robótica en general, existen confusiones en los medios, sobretodo en lo que denominamos Robótica INDUSTRIAL y Robótica de SERVICIO, por lo que debe denominarse la normativa ISO correspondiente a los conceptos de robótica de cada uno de sus productos. Este proceso es básico para su desarrollo, fabricación y comercialización. Las normativas ISO son definidas por la International Federation of Robotics (IFR), institución de la cual somos miembros fundadores.
La definición de Robótica Industrial la encontramos en la norma ISO 8373 y es como sigue: “Manipulador multifincional, controlado automáticamente, reprogramable en tres o más ejes, que puede estar fijo o móvil para uso en aplicaciones de automatización industrial
Historia de la robótica
La historia de la robótica va unida a la construcción de "artefactos" que trataban de materializar el deseo humano de crear seres a su semejanza y que al mismo tiempo lo descargasen de trabajos tediosos. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas, tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1923 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder o, simplemente aliviando de las labores caseras.
Robótica educativa

La robótica educativa es un medio de aprendizaje en el cual participan las personas que tienen motivación por el diseño y construcción de creaciones propias (objeto que posee características similares a las de la vida humana o animal). Estas creaciones se dan, en primera instancia, de forma mental y, posteriormente, en forma física y son construidas con diferentes tipos de materiales, y controladas por un sistema computacional, los que son llamados prototipos o simulaciones.
Este sistema de enseñanza es interdisciplinario porque abarca áreas de diferentes asignaturas del programa escolar reglado. Así, en los cursos de Robótica Educativa bien estructurados, se trabajan áreas de Ciencias, Tecnología, Ingeniería y Matemáticas, lo que en inglés se conoce con las siglas STEM (Science, Technology, Engineering, Mathematics), así como áreas de Lingüística y también de Creatividad.

El equilibrio del robot ya le permitía correr libremente sin cables. Este nuevo avance lo hace aún más versátil a campo abierto o, mejor dicho, en el campo de batalla. Recordemos que Cheetah es un proyecto financiado directamente por la agencia militar DARPA.
Los investigadores que lo desarrollan aseguran que es el primer robot cuadrúpedo capaz de realizar este truco. Para lograrlo, Cheetah integra un sensor láser que le informa de la distancia y tamaño de los obstáculos en tamaño real. Con esa información, una serie de nuevos algoritmos deciden hasta donde plegar las patas delanteras del robot y, al mismo tiempo, el impulso que hay que dar con las traseras para saltar el obstáculo. Exactamente lo que hace el cerebro de un animal de manera prácticamente inconsciente, pero en una máquina.
robot agricola

Los robots son comúnmente utilizados en la manufactura de productos de alimentación, pero aún son poco frecuentes en el campo abierto o en los invernaderos, contribuyendo en el ciclo productivo agrícola. Sin embargo, la tecnología robótica aplicada al sector agrícola se encuentra en un estado de desarrollo avanzado, con algunas realizaciones ya plenamente comerciales y otras validadas a nivel de prototipo. La inminente necesidad de aumentar la producción sin aumentar los recursos y minimizando el impacto ambiental, demanda, tal vez de manera inexorable, dar el paso de la mecanización a la automatización de la agricultura, en donde la robótica agrícola tendrá un protagonismo destacado.
¿

Las personas operadas por robots se han beneficiado en varios aspectos. No sólo la intervención es realizada con mucha más precisión sino que la recuperación es mucho más acelerada. El uso del robot elimina los temblores humanos, es capaz de entrar a zonas inasequibles para los médicos y daña menos tejido sano en los alrededores de la región afectada.
Además, el uso de los robots reduce la estadía en el hospital, disminuye el trauma operativo, beneficia el impacto cosmético de la intervención y atenúa el tiempo de recuperación.
Tecnologías de la comunicación

El término tecnologías de la información y la comunicación (TIC) tiene dos acepciones: por un lado, a menudo se usa tecnologías de la informaciónpara referirse a cualquier forma de hacer cómputo. Por el otro, como nombre de un programa de licenciatura, se refiere a la preparación que tienen estudiantes para satisfacer las necesidades de tecnologías en cómputo y comunicación de gobiernos, seguridad social, escuelas y cualquier tipo de organización.1
Planificar y gestionar la infraestructura de TIC de una organización es un trabajo difícil y complejo que requiere una base muy sólida de la aplicación de los conceptos fundamentales de áreas como las ciencias de la computación y los sistemas de información, así como de gestión y habilidades del personal. Se requieren habilidades especiales en la comprensión, por ejemplo de cómo se componen y se estructuran los sistemas en red, y cuáles son sus fortalezas y debilidades. En sistemas de información hay importantes preocupaciones de software como la fiabilidad, seguridad, facilidad de uso y la eficacia y eficiencia para los fines previstos, todas estas preocupaciones son vitales para cualquier tipo de organización.2

La robótica de servicios de transporte , tiene como límites naturales hasta el momento, los de los interiores de los edificios e instalaciones privadas debito a las normativas que afectan al tráfico rodado, y a la propia complejidad técnica del entorno del transporte. Existen sin embargo interesantes propuestas como el concurso de la agencia gubernamental estadounidense, DARPA, que han ido evolucionando desde el transporte off-the-road a los nuevos modos de transporte robotizado urbano y que indican que es posible una movilidad automatizada con sistemas de conducción automatizada que los fabricantes de automóviles europeos deben comenzar a valorar si no desean quedarse fuera del futuro automóvil. Un automóvil verde y robotizado, que proponemos como objetivo estratégico para la industria europea sita en el Estado Español, mejorando la propuesta de Green Car que ahora mismo el Plan de Recuperación Económica de la UE plantea.
robot submarino

.
Durante los últimos años, el uso de vehículos robots submarinos ha aumentado rápidamente, desde que tal vehículo se puede operar en las áreas más profundas y más arriesgadas que buzos no pueden alcanzar. Entre las aplicaciones potenciales de tales vehículos tenemos el área de la pesca, control submarino de contaminación, y la manipulsación y limpieza del océano, así como de sitios nucleares.
Se trata de un área de diversas aplicaciones en el mundo real, ya que permite y facilita la exploración, la búsqueda y rescate y estudios científicos en zonas muy profundas del mar, a pesar de problemas que se pueden presentar, como son la alta dinámica y la naturaleza del ruido del medio submarino, así como también la carencia de puntos de referencia y las limitaciones en las comunicaciones por efecto del agua.
TEDAX

Técnico Especialista en Desactivación de Artefactos Explosivos (TEDAX)es la denominación que reciben en España los especialistas cuya actividad es la neutralización, desactivación e intervención de artefactos explosivos no reglamentarios (conocidos popularmente como "bombas") y la realización de los estudios e informes (peritajes) de los mismos. También se les denomina artificieros.
Dichos especialistas forman parte de las unidades del mismo nombre que existen en los cuerpos policiales y, hasta que se cambiaron el nombre en el año 2001, también en los militares. Dicho cambio de denominación en las Fuerzas Armadas (FAS) Españolas sucedió a raíz de la entrada del país en la OTAN. La adopción de los estándares internacionales referentes a la actividad EOD en los ejércitos supuso, por un lado, que la denominación TEDAX se sustituyera por la denominación internacional EOD (del inglés Explosive Ordnance Disposal, Eliminación de Municiones y Artefactos Explosivos), y por otro, que la capacitación de dichos técnicos militares EOD españoles cubriese también la desactivación de artefactos explosivos convencionales no explosionados (municiones).
Ayudante de limpieza

la fantasía de un robot humanoide que te espera con la cena lista y la casa ordenada aún es una cuenta pendiente, pero ya existen y están entre nosotros pequeños dispositivos que nos hacen algunas tareas hogareñas más sencillas. Hay máquinas que se encargan de mantener en condiciones nuestro jardín, limpian la piscina, aspiran en forma autónoma nuestro hogar y barren.
Los primeros robots que llegaron a los hogares fueron las aspiradoras autónomas. Se trata de un pequeño dispositivo que va por toda la casa limpiando. Desde el primer modelo han avanzado mucho y ya varias marcas tienen sus propias propuestas. Entre ellas, se encuentra iRobot, una compañía que se inició fabricando equipos para defensa y ahora también cuenta con una línea de máquinas hogareñas que aspiran, barren, limpian el fondo de la pileta y hasta las canaletas de los techos.
Estos restaurantes japoneses son mejores porque en ellos (casi) no hay seres humanos

Solemos preferir el contacto humano al frío contacto con un robot. Sin embargo, las máquinas están demostrando ser mucho más competentes que los humanos en infinidad de tareas, desde el pilotaje de aviones hasta el diagnóstico médico. Naturalmente, en el ámbito de la restauración también se están revelando como mejores cocineros que muchos humanos, y también mejores camareros.
O eso es lo que deben pensar los responsables de la cadena japonesa de establecimientos de comida rápida Kura, especializada en servir sushi. En sus 262 establecimientos de la cadena, ahora hay robots que ayudan a preparar el sushi, y los camareros han sido sustituidos por cintas transportadoras.
Las ventajas de enseñar robótica en los colegios

Si a los niños les interesan los robots, ¿por qué no introducirlos en los colegios? De hecho, estas máquinas ya forman parte de las vidas de los chavales en muchas otras facetas y esferas (salud, ocio, etc.). ¿No sería razonable, pues, que los escolares potenciasen muchas de sus aptitudes a través de unos dispositivos mecánicos que pueden ser programados para seguir un conjunto de instrucciones? Desde Estados Unidos hasta Australia, pasando por España, cada vez son más los centros que incorporan esta disciplina a sus planes de estudios u ofertas complementarias.
Con independencia de los programas docentes concebidos con esta finalidad —aderezados con ciencia, matemáticas e ingeniería—, en internet hay abundantes recursos disponibles para que tanto los profesores como los padres puedan despertar en los menores su curiosidad per la robótica. Lego, Vex o Albedaran son algunas de las empresas que se han decidido a explorar esta vía. Y, en general, lo han hecho con éxito, por ejemplo, a través de los campeonatos que organiza el primero de estos fabricantes en ciudades como Madrid.

La tendencia en la construcción nos lleva hacia modelos de edificación cada vez más industrializados, menos mano de obra pero más cualificada, con procesos de construcción más cortos, y otras ventajas que resultan en una edificación de calidad y a más bajo coste que con los métodos tradicionales. Por este motivo hoy os voy a mostrar diferentes robots y maquinas que están en desarrollo o que ya se podrían utilizar en obra.
robots destinados a sustituir a los obreros en situaciones de alto riesgo como la inspección de edificios a grandes alturas, por lo que serían de gran utilidad en el campo de la rehabilitación. Dentro de esta familia encontramos los HyDRAS-Ascent e HyDRAS-Ascent II, que funcionan gracias a un motor eléctrico, y CIRCA que lo hace mediante un sistema de aire comprimido. Estos robots tienen forma de serpiente, como vemos en la imagen, y cuentan con sensores y cámaraspara poder realizar las inspecciones en la estructura necesarias.
kirobo el robot astronauta

El primer astronauta robot humanoide ha despegado para estar en el espacio. Kirobo, nombrado así por sus creadores japoneses, es uno de los tantos dispositivos que se encuentran en una nave espacial que despegó de Tanegashima, al sudoeste de Japón, con dirección a la Estación Espacial Internacional.
El robot de aspecto infantil, cuyo nombre deriva de “esperanza” y “robot” en japonés está diseñado para ser compañía para el astronauta Koichi Wakata. De acuerdo a Tomotaka Takahashi, el desarrollador del androide, Kirobo podrá recordar el rostro de Wakata para reconocerlo cuando se reúnan arriba en el espacio. Takahashi de la Universidad de Tokyo se unió con la agencia de publicidad Dentsu y la compañía automotriz Toyota
Robótica para la minería

La industria minera presenta características que la hacen muy adecuada para la inclusión de robots. Muchos de los trabajos relacionados con la minería son aburridos, sucios o peligrosos para los trabajadores, los cuales podrían ser ubicados en áreas donde sus habilidades se explotaran de una manera más adecuada. Desde el punto de vista operativo, las características de estos oficios resultan en salarios altos y elevados gastos en seguridad, y afectan negativamente en la motivación del trabajador. Los robots pueden ser usados para superar estos desafíos. Aunque éstos podrían no estar capacitados para reemplazar completamente a los trabajadores, sí podrían hacer los oficios más interesantes, limpios y seguros. Los robots también podrían a futuro aumentar la eficiencia del proceso, incrementar utilidades y potencialmente proveer vías más sustentables para extraer compuestos de la tierra y minerales de los compuestos.
ganaderia en la robotica

Robótica en la agricultura; Es la ciencia o rama de la ciencia que se ocupa de diseño, fabricación y utilización de aplicaciones de los robots a La agricultura intensiva bajo plástico genera problemas de salud laboral muy importantes. Se pretenden sustituir los trabajos dentro de invernadero que implican riesgo para la salud, para ello se han diseñado robots móviles autónomos que realizan las funciones que normalmente llevan a cabo los agricultores. También se han abordado otras tareas agrícolas tales como la recolección (vibradores), fumigación en campo abierto, monitorización de cultivos y para servicios integrales en invernadero.
Varias empresas y universidades están desarrollando una nueva generación de robots agrícolas que podrían reemplazar a la mano de obra humana en la recolección de la fruta, una tarea que requiere gran precisión y que, hasta ahora, es demasiado delicada para la maquinaria.
robotica en los satelites

Es la idea que tres ingenieros aeroespaciales europeos han presentado en el Acta Astronautica, revista de la Internacional Academy of Astronautics (IAA), y que trata de cambiar en un futuro las bases de las misiones de reparación de los satélites que orbitan alrededor de la Tierra.
El motivo principal parece ser económico. Planificar y llevar a cabo una de estas misiones conlleva importantes gastos considerados actualmente como un derroche, a parte de crear problemas de agenda para la comunidad espacial. A esto deberíamos sumar el riesgo para la tripulación asignada a la reparación del satélite, tanto en el viaje como en la propia tarea.
alianza entre 2 robots

Podemos discutirlo. Los analistas y medios de comunicación suelen hacer sus cálculos teniendo en cuenta sólo dos variables: cuántos trabajos son automatizables y cuántos operarios están siendo reemplazados en estos momentos por una máquina inteligente.
Sin embargo, esa estimación es mucho más burda e inexacta de lo que parece. Para empezar excluyen de la ecuación los puestos de trabajo que crean las industrias que producen los robots. La nueva fiebre por este tipo de máquinas inteligentes y la aparición de unas posibilidades técnicas que antes no existían han provocado la emergencia de decenas de empresas en todo el mundo que cada vez están en mejores condiciones de doblegar a los países que habían dominado tradicionalmente el sector (Alemania, Suiza y Japón) y sus gigantes corporativos (Kuka, ABB, Staübli y Fanuc). El valor de mercado del segmento de los robots industriales superó los 26.000 millones de euros en 2013 mientras que el de la inteligencia artificial va a situarse en 27.000 millones de euros en 2015
Robotiuris

Se trata del I Congreso de Derecho Robótico organizado por FIDE en el que analizarán los aspectos legales y éticos de los drones, coches autonómos, robots inteligentes y la inteligencia artificial, así como los avances científicos y técnicos más disruptivos
El Congreso está dirigido por Alejandro Sánchez del Campo, Digital Counsel de Telefónica. Miembro del Consejo Académico de Fide. Será en Madrid, sede FIDE en Calle Serrano, 26 - 4º D, el próximo día 4 de Noviembre, jueves, de 2016, de 09:00 - 18:00h.
El Congreso está dirigido por Alejandro Sánchez del Campo, Digital Counsel de Telefónica. Miembro del Consejo Académico de Fide. Será en Madrid, sede FIDE en Calle Serrano, 26 - 4º D, el próximo día 4 de Noviembre, jueves, de 2016, de 09:00 - 18:00h.
9.20 h Acto inaugural por Antonio Garrigues Walker, Presidente de la Fundación Garrigues.
9.30-10-00 h ¿De qué hablamos realmente cuando hablamos de robots?
• JUAN CARLOS LLORENTE, Responsable de Desarrollo de Negocio de Robótica de GMV.
10.00-11.00 h Responsabilidad civil y penal de los robots inteligentes. ¿Pueden cometer delitos o ser sujetos de derechos u obligaciones y/o de una personalidad jurídica especial?
• FRANCISCO ROSALES DE SALAMANCA, Notario
• PABLO GARCIA MEXIA, Profesor visitante de Derecho de Internet en el College of William & Mary. Letrado de las Cortes. Of Counsel en Ashurst LLP.
• JUAN PABLO NIETO MENGOTTI, Ha sido abogado de empresa durante 25 años. En la actualidad ejerce como Fiscal (moderador)
9.30-10-00 h ¿De qué hablamos realmente cuando hablamos de robots?
• JUAN CARLOS LLORENTE, Responsable de Desarrollo de Negocio de Robótica de GMV.
10.00-11.00 h Responsabilidad civil y penal de los robots inteligentes. ¿Pueden cometer delitos o ser sujetos de derechos u obligaciones y/o de una personalidad jurídica especial?
• FRANCISCO ROSALES DE SALAMANCA, Notario
• PABLO GARCIA MEXIA, Profesor visitante de Derecho de Internet en el College of William & Mary. Letrado de las Cortes. Of Counsel en Ashurst LLP.
• JUAN PABLO NIETO MENGOTTI, Ha sido abogado de empresa durante 25 años. En la actualidad ejerce como Fiscal (moderador)
Robots Polimórficos

La robótica polimórfica, auto-adaptativa, auto-organizativa y en general auto-* está generalmente relacionada con el campo de la conciencia artificial. Básicamente, se requiere algún grado de auto-conciencia para que un robot se auto-repare o auto-cure. La conferencia SASO 2007 cubre esta disciplina (First IEEE International Conference on Self-Adaptive and Self-Organizing Systems. Boston, Mass., USA, July 9-11, 2007) [1].
Los temas tratados son: auto-organizacióm, auto-adaptatividad, auto-gestión, auto-monitorización, auto-configuración, auto-reparación, etc. No hay duda de que la integración de este tipo de técnicas con modelos cognitivos require un modelo de tipo consciencia artificial.
robotica automotris

Hoy en día, los robots industriales son más comunes en las plantas de automóviles, quienes han sido durante mucho tiempo los mayores usuarios de robots de tecnología para realizar trabajos que no tienen mucha delicadeza: levantar objetos pesados, soldar, aplicar pegamento y pintura. La mayor parte del montaje final de los autos es todavía realizado por personas, sobre todo cuando se trata de pequeñas piezas o de cableado que necesita ser guiado a su lugar
Aquellos que están incorporándose a las fábricas y que los laboratorios tienen e desarrollo pueden trabajar junto a los humanos sin ponerlos en peligro pues ayudan a montar todo tipo de objetos, desde cosas grandes como motores de avión a otras pequeñas y delicadas como los teléfonos inteligentes.
robotica aerea

Ya se encuentra disponible el curso online gratuito de Robótica Aérea dictado por la Universidad de Pensilvania con posibilidad de certificación.
Esta es una buena noticia que alegrará a muchos estudiantes, profesionales y técnicos de la programación, electrónica, y robótica. Resulta que la Universidad de Pensilvania ha puesto a disposición del público académico una especialización en robótica compuesta de seis cursos universitarios.
Hoy vamos a abordar el primero de ellos: "Robótica Aérea", una introducción a la mecánica de vuelo y el diseño de robots voladores Quadrotor. A lo largo de este curso universitario serás capaz de crear modelos dinámicos con controladores y sintetizarás conceptos planificadores para operar en tres dimensiones.
El curso representa un desafío para aquellos estudiantes interesados en trabajar con los sensores de ruido, localización y maniobras en entornos complejos y tridimensionales. ¡Prepárate para una visión completa de la industria del avión no tripulado!
Esta es una buena noticia que alegrará a muchos estudiantes, profesionales y técnicos de la programación, electrónica, y robótica. Resulta que la Universidad de Pensilvania ha puesto a disposición del público académico una especialización en robótica compuesta de seis cursos universitarios.
Hoy vamos a abordar el primero de ellos: "Robótica Aérea", una introducción a la mecánica de vuelo y el diseño de robots voladores Quadrotor. A lo largo de este curso universitario serás capaz de crear modelos dinámicos con controladores y sintetizarás conceptos planificadores para operar en tres dimensiones.
El curso representa un desafío para aquellos estudiantes interesados en trabajar con los sensores de ruido, localización y maniobras en entornos complejos y tridimensionales. ¡Prepárate para una visión completa de la industria del avión no tripulado!
robotica bionica

En este documento se realiza el estudio del arte acerca del rol que desempeña la robótica en la vida del hombre. Gracias a la biónica, una de las ramas de la robótica, se logra reemplazar miembros humanos por artefactos distintos a los naturales, convirtiéndose en una herramienta de gran ayuda para personas con ciertas discapacidades. Con el pasar del tiempo, el campo la robótica aplicada al ser humano (biónica) ha proporcionado al ser humano extremidades complementarias, las mismas que se vuelven cada vez más eficientes. El estudio de esta ciencia abarca un campo muy amplio por lo cual este documento se centra en las prótesis inteligentes de miembros superiores o conocido como cyberhand
Desde hace tiempo el hombre se ha enfrentado a varias situaciones peligrosas en las cuales ha sido inevitable la perdida de alguna de sus extremidades y en el peor de los casos su vida, un claro ejemplo son las guerras en donde los soldados morían o perdían algunas de sus extremidades en los enfrentamientos armados, o en la actualidad: accidentes tránsito, malas prácticas deportivas, enfermedades cancerígenas, etc. La tecnología ha avanzado a pasos agigantados y siempre con el mismo objetivo, el de facilitar de alguna manera la vida del ser humano, es así que surge la necesidad de reemplazar con aparatos robóticos alguna extremidad del cuerpo o mejorar la movilidad del mismo. En este documento se pretende realizar el estudio del arte, destacando el desarrollo de las prótesis de manos, un invento que será de gran ayuda para personas que poseen esta discapacidad [2][6].
beam

Un robot es considerado un BEAM, cuando está realizado por circuitos analógicosy normalmente simples, como comparadores, sin tener que depender de microcontroladores, por lo que son robots no programables. Fueron creados por Mark W. Tilden, como una Red Neuronal Artificial. BEAM, aplicado a la Robótica, significa Biology, Electronics, Aesthetics, and Mechanics.
Se suele intentar imitar la vida de los insectos y su forma de moverse por un entorno, por lo que suelen estar realizados por estructura robustas y simples, que le dan mucha fiabilidad, además de usar células solares para hacerlos así más autónomos. Los componentes usados para la creación de un robot BEAM, suelen ser materiales reciclados, como motores de teléfonos móviles o juguetes, resistencias, transistores, etc.
ELECTROMAGNETISMO

Este es mi primer blog, con un sencillo artículo de prueba que espero lo disfruten. Quisiera compartir un tema importante relacionado con una de mis pasiones, la Robótica. Este fascinante campo del conocimiento humano, es el resultado de años de experiencia de profesionales con distintas especialidades alrededor del mundo. Uno de los pilares que sostienen a la Robótica, es una rama dentro la física conocida como Electromagnetismo, cuyas leyes y principios gobiernan el comportamiento de una partícula sub atómica conocida como el electrón, cuyo entendimiento y comprensión son elementos clave en carreras como Ciencias de la Computación, Telecomunicaciones, Bioelectricidad y por supuesto Robótica, entre otras.
explorador de martes

La exploración espacial de Marte comenzó en el contexto de la carrera espacialentre Estados Unidos y la Unión Soviética a la que dio lugar la Guerra Fría entre estos dos países. Pero el interés en Marte y en la posibilidad de que allí hubiera vida, se remonta ya a 1877 cuando el astrónomo italiano Giovanni Schiaparelliafirmó haber visto canales por todo el planeta. Posteriores astrónomos habían intentado comprobar la postulación del astrónomo estadounidense Percival Lowellque sugería que los presuntos canales descubiertos por Schiaparelli eran un sistema de irrigación creado por seres inteligentes.
Aunque no había pruebas reales de estas especulaciones, se creó toda una serie de teorías o mitos sobre Marte, que trascendieron en la literatura y en la creación de leyendas sobre supuestos marcianos que hacían visitas a distintas partes de la Tierra.
explorador fauna

En el caso de los que tienen alas, como ser moscas o abejas, estos maravillan por el poder que concentra un ser viviente tan pequeño para agitar sus alas y no solo poder volar, sino también poder maniobrar con unos reflejos impensados. Mientras que los insectos terrestres, seguramente en más de una ocasión nos quedamos asombrados observando una hormiga cargar una hoja de árbol, las cuales habitualmente tienen un peso bastante superior a estos insectos. La ciencia descubrió que las hormigas poseen un exoesqueleto que les permite manipular hasta cincuenta veces su peso sin problema alguno.
Justamente un equipo de I+D de la Universidad de Stanford, liderado por David Christensen, logró llevar a la realidad este poder único que poseen los insectos. Los microbots creados por esta universidad pueden levantar miles de veces su peso. Por lo tanto, con un ejército de estas pequeñas máquinas se podría, en un futuro cercano, llegar a realizar cualquier tarea que podamos imaginar: mover muebles, limpiar una casa, o asistir a un humano con el traslado de las compras de supermercado.
Seis grados de libertad

Seis grados de libertad se refiere al movimiento en un espacio tridimensional, es decir, la capacidad de moverse hacia delante/atrás, arriba/abajo, izquierda/derecha (traslación en tres ejes perpendiculares), combinados con la rotación sobre tres ejes perpendiculares (Guiñada, Cabeceo, Alabeo). El movimiento a lo largo de cada uno de los ejes es independiente de los otros, y cada uno es independiente de la rotación sobre cualquiera de los ejes, el movimiento de hecho tiene seis grados de libertad.
Los brazos de un Robot, a menudo son categorizados por sus grados de libertad (por lo general más de seis grados de libertad). Este número generalmente se refiere al número de un solo eje de rotación de las articulaciones en el brazo, donde un mayor número indica una mayor flexibilidad en posicionar una herramienta. Esta es una métrica muy práctica, en contraste a la definición abstracta de los grados de libertad, que mide la capacidad global de posicionamiento de un sistema. Dean Kamen, inventor del Segway, presentó recientemente un prototipo de un brazo robótico con 21 grados de libertad para DARPA. Los robots humanoides suelen tener 30 o más grados de libertad, con seis grados de libertad en el brazo, cinco o seis en cada pierna, y varios más en el torso y el cuello.
hidráulica

Los robot electricos adoptan el nombre de impulsión eléctrica cuando se usa la energía eléctrica para que el robot ejecute sus movimientos. La impulsión eléctrica se utiliza para robots de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia como los robots diseñados para funcionar con impulsión hidráulica. Los robots que usan la energía eléctrica se caracterizan por una mayor exactitud y repetibilidad.
Para los Neumaticos son aquellos robots que se valen de la impulsión neumática para realizar sus funciones. En la impulsión neumática se comprime el aire abastecido por un compresor, el cual viaja a través de mangueras. Los robots pequeños están diseñados para funcionar por medio de la impulsión neumática. Los robots que funcionan con impulsión neumática están limitados a operaciones como la de tomar y situar ciertos elementos. Es importante señalar que no todos los elementos que forman el robot pueden tener el mismo tipo de impulsión.
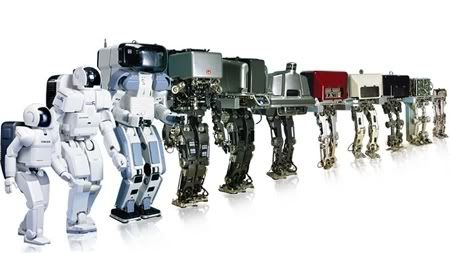
robot humanoide

Un diseño humanoide puede tener fines funcionales, tales como la interacción con herramientas y entornos humanos, con fines experimentales, como el estudio de la locomoción bípeda, o para otros fines. En general, los robots humanoides tienen un torso, una cabeza, dos brazos y dos piernas, aunque algunas formas de robots humanoides pueden modelar sólo una parte del cuerpo, por ejemplo, de la cintura para arriba. Algunos robots humanoides pueden tener cabezas diseñadas para replicar los rasgos faciales humanos, tales como los ojos y la boca. Los androides son robots humanoides construidos para parecerse estéticamente a los humanos. Los robots humanoides actualmente son usados como herramienta en investigaciones científicas.
robotica japonesa

La dependencia e intimidad del estilo de vida japonés en torno a la tecnología ha hecho que japón se gane la reputación del país amante de la tecnología. Esto refuerza la imagen fría, impersonal, maquinaria, autoritaria y exenta de conexión emocional hacia el resto del mundo, haciendo de Japón una fuente de admiración y envidia, asombro y miedo. Muestra de la estrecha relación entre cultura y tecnología es la serie de Astroboy de Tezuka Ozamu.
Debido a la escasez de recursos naturales, la tecnología era la única vía para Japón para garantizar un valor agregado a sus productos manufacturados, convirtiendo materias primas importadas en bienes de tecnología de punta para exportación, lo que garantizó a Japón el éxito en la Segunda Guerra Mundial. Hoy en día, en un contexto de tasas de natalidad decrecientes, una población que va envejeciendo, y problemas ambientales y energéticos, los robots son vistos como una forma de crear una sociedad afluente con alta calidad de vida.
ROBOTS POLIMÓRFICOS

En los últimos 15 años la evolución de los ROBOTS POLIMÓRFICOS ha sido muy amplia. En la actualidad se emplean en multitud de industrias cuando las operaciones a realizar conllevan una cierta complejidad.
Los ROBOTS POLIMÓRFICOS son una herramienta imprescindible para la realización de una gran variedad de tareas, tanto de paletización, movimiento, manejo como de clasificación de todo tipo de productos. Pueden realizar tareas consideradas como complejas, las cuales anteriormente se consideraban no
automatizables.
Como en cualquier sistema de automatización industrial, los ROBOTS POLIMÓRFICOS están especialmente indicados en tareas monótonas o donde se realicen trabajos físicamente pesados que conllevan un alto coste de mano de obra y riesgos de manipulación.
En los últimos 15 años la evolución de los ROBOTS POLIMÓRFICOS ha sido muy amplia. En la actualidad se emplean en multitud de industrias cuando las operaciones a realizar conllevan una cierta complejidad.
Los ROBOTS POLIMÓRFICOS son una herramienta imprescindible para la realización de una gran variedad de tareas, tanto de paletización, movimiento, manejo como de clasificación de todo tipo de productos. Pueden realizar tareas consideradas como complejas, las cuales anteriormente se consideraban no automatizables.
Como en cualquier sistema de automatización industrial, los ROBOTS POLIMÓRFICOS están especialmente indicados en tareas monótonas o donde se realicen trabajos físicamente pesados que conllevan un alto coste de mano de obra y riesgos de manipulación.
Las SOLUCIONES basadas en la integración de ROBOTS POLIMÓRFICOS son modulares y versátiles y dada la experiencia acumulada, IDPSA propone este tipo de SOLUCIÓN a un PRECIO COMPETITIVO y fácilmente AMORTIZABLE
robotica tic

Robótica
Una de las principales características que presenta el ser humano es saber aprovechar,
en su beneficio, todo lo que le rodea, aunque desgraciadamente esto haya supuesto, en
algunos casos, el deterioro del medio ambiente.
En un principio, aprovechó la fuerza animal para realizar ciertas tareas; posteriormente,
creó máquinas para realizar aquellos trabajos que requerían un gran esfuerzo físico y
aprendió a utilizarlas para automatizar otros muchos que resultaban rutinarios; sin
embargo, esto no le bastó. Hace relativamente poco tiempo, y gracias al desarrollo de la
informática, ha comenzado a crear otras máquinas, denominadas robots, que permiten
ser utilizadas en distintas situaciones o procesos. Por otra parte, también ha comenzado
a controlar los dispositivos que diseña; por ejemplo, para hacer más cómodas las
viviendas diseña y crea dispositivos que permitan controlar, gracias a la informática,
acciones habituales como subir persianas, apagar aparatos electrodomésticos, activar y
desactivar sistemas de alarma…, lo que ha originado un nuevo campo de estudio: la
domótica.
Mecanización, Automatización y Robotización
Se entiende por mecanización la incorporación de máquinas para ejecutar determinadas
tareas; el propósito no es otro que realizar, de modo mecánico, una serie de acciones
que anteriormente se llevaban a cabo de modo manual; el resultado final es una mayor
rapidez en el trabajo y una mejor calidad en el resultado.
La automatización consiste en eliminar, de forma parcial o total, la intervención de
personas en la ejecución del trabajo; el propósito, en este caso, es el de realizar
automáticamente ciertas tareas, sin participación de persona alguna. Las máquinas
automáticas pueden repetir continuamente
robotica unam

la acción para la que están diseñadas pero sin
posibilidad de variar su funcionamiento. Las consecuencias más directas son el aumento
de productividad y la realización de tareas desagradables o peligrosas sin participación
humana.
La robotización también es una automatización (no intervienen personas) pero, en este
caso, las máquinas utilizadas son capaces de realizar diferentes acciones según se las
programe; además, serán capaces de captar información de su alrededor y pEl Departamento de Ingeniería de Control y Robótica tiene como misión fundamental proporcionar a los alumnos de las carreras impartidas por la DIE, los conocimientos fundamentales de la teoría de control, sus campos afines como la automatización e instrumentación, y sus diversas vertientes de desarrollo académico y aplicación industrial.
A través de sus actividades académicas propicia e impulsa el desarrollo de los alumnos y personal académico a una de mayor especialización en las áreas mencionadas, con base en estudios de especialización y posgrado, actividades de investigación y participación en proyectos de vinculación.
Por ende el Departamento de Ingeniería de Control y Robótica tiene como objetivo el impartir y transmitir conocimientos sólidos relacionados con el área de control, instrumentación y automatización con la mejor profundidad y formalidad requerida para los estudiantes de Ingeniería de la DIE.

Proporcionar al estudiante una cultura científica, tecnológica y humanística, a través de una formación metodológica que lo prepare en el campo profesional del control de procesos industriales automatizados, de la implementación de sistemas robóticos de propósitos específicos, de sistemas de manufactura flexibles y del desarrollo de nuevas tecnologías en el campo de la robótica.
Debido a la calidad de sus conocimientos, el Ingeniero Robótico estará altamente calificado para el diseño, desarrollo, mantenimiento e implementación de sistemas sofisticados en los campos de:
La industria, que ha llevado a los países desarrollados a alcanzar los niveles de producción y calidad que los caracterizan, principalmente en los giros de la electrónica, la automotriz, la aeroespacial y la manufactura de productos químicos y plásticos, principalmente.
Aplicaciones en la salud, las cuales van desde la mejora en los procedimientos quirúrgicos hasta la rehabilitación con prótesis inteligentes y cuidados personales.
La industria del entretenimiento y la de la producción de agrícola.
La industria, que ha llevado a los países desarrollados a alcanzar los niveles de producción y calidad que los caracterizan, principalmente en los giros de la electrónica, la automotriz, la aeroespacial y la manufactura de productos químicos y plásticos, principalmente.
Aplicaciones en la salud, las cuales van desde la mejora en los procedimientos quirúrgicos hasta la rehabilitación con prótesis inteligentes y cuidados personales.
La industria del entretenimiento y la de la producción de agrícola.
robotica vex

Venus Express (VEX) was the first Venus exploration mission of the European Space Agency (ESA). Launched in November 2005, it arrived at Venus in April 2006 and began continuously sending back science data from its polar orbit around Venus. Equipped with seven scientific instruments, the main objective of the mission was the long term observation of the Venusian atmosphere. The observation over such long periods of time had never been done in previous missions to Venus, and was key to a better understanding of the atmospheric dynamics. It was hoped that[needs update] such studies can contribute to an understanding of atmospheric dynamics in general, while also contributing to an understanding of climate change on Earth. ESA concluded the mission in December 2014.[4]
robotica xataka

Todos conocemos esas aplicaciones móviles que transforman imágenes o fotografías en zombies o monstruos, algo que se logra gracias a filtros y algoritmos que analizan los rasgos de la imagen para incorporar detalles extraídos de una base de datos. En general se trata de un trabajo sencillo y que sirve como mero entretenimiento, pero ahora el MIT quiere ir más allá con esta idea y para ello se está apoyando en la inteligencia artificial.
El MIT en colaboración con la CSIRO (Commonwealth Scientific and Industrial Research Organisation) de Australia han creado la 'Nightmare Machine', un algoritmo de inteligencia artificial capaz de transformar un rostro o un paisaje en material de una aterradora pesadilla, donde el objetivo es enseñar a las máquinas lo que no le gusta a los seres humanos, en serio. Algo que no estamos seguros que sea una buena idea.


Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores.